Table of Contents:
– Introduction
– Background on Ballistics Calculation and Modeling
– Background on How Laser Rangefinders Work
– Unboxing,Look, and Feel
– Background on the Challenges of Getting Optical Performance from a LRF Bino
– Optical Performance
– Laser Performance
– Other Onboard Sensors
– GPS Mapping with BaseMap
– Ballistic Software
– Summary and Conclusion
– Addendum: Laser Rangefinders, Snow, and the Sig 10k Fog mode
Introduction:
It seemed to me that given my focus on rangefinders this year, I should take a look at Sig’s new Kilo 10K-ABS HD rangefinding binoculars. Boasting 10,000 yds of maximum range on reflective targets, Applied Ballistics Elite baked in, and a unique 304 x 256 AMOLED display, they have made a big splash. This maximum range claim is substantially greater than any similarly priced competitor and the 1.5x .06 MRAD beam dispersion also suggests some interesting possibilities. The 10ks are also compatible with Sig’s Ballistic Data eXchange 2.0 system, an ecosystem wherein hunters can select one of a variety of BDX 2.0 scopes to pair with any one of a variety of BDX 2.0 rangefinders. In this system, the rangefinder will automatically send the scope the calculated ballistic solution based on the range measured and the scope will light up pixels on the reticle at the correct drop and drift for the shot. Sig sent me a Sierra 6BDX 3-18x44mm scope along with the rangefinder for a full look at the BDX 2.0 system following this review of the Kilo 10k rangefinding binoculars. In keeping with Sig’s focus on leading integration of electronics with optics, BDX scopes also include Sig’s LevelPlex system first examined in my review of the Sig Tango6 5-30x56mm scope last year. The whole system looks pretty slick to me.
Background on Ballistics Calculation and Modeling
This brings us to changes in ballistics calculations and Applied Ballistics Elite. For a long time, ballistics calculators have virtually all used the same underlying math, which is essentially based on the measured trajectories of two basic tested projectiles, these being the G1 and G7.

Each software would iterate from these underlying measured trajectories using a comparison factor known as the Ballistic Coefficient. This coefficient established a comparative degree of aerodynamics between the shooter’s specific bullet and the G1 or G7 standard, according to which the formula would stretch and deform the original G1 or G7 measured trajectory to be more like what would be expected from the user’s bullet. This is where the G1 and G7 BC numbers on your bullet box come from and what they mean.

In practice, the typical process using G1 or G7 based software was to measure the velocity of your rifle when establishing your 100 yd zero or when developing a new handload for your rifle, then plug that value along with the BC on the box and your atmospherics into your software to get an initial set of ballistic solutions for different distances. These would of course be wrong by a few tenths of a mil or so as you got further out. You would write down the real field-recorded values and then fudge with the BC and / or velocity until the model being spit out was as close to correct as you could get it. This new model would be helpful in spitting out good numbers for different untested distances or on days with different atmospheric conditions. It wouldn’t be perfect and, with all the guessing and checking, it would take a while to get to, but it would be helpful.
Of course, the model faced some limitations because your bullet is not actually shaped like either the G1 or G7 standard. Its trajectory is fundamentally not just a G1 or G7 trajectory stretched a bit. Furthermore, you are firing it from a gun a bit different from whatever the test gun was in those original trajectory studies, at a different initial velocity. All this matters. The bottom line is that there is a limit to how accurately you can stretch the G1 or G7 trajectories based on just a BC number and initial velocity number, and that limit is not as good as many of us would like it to be.
Because of this, a couple of companies have begun measuring the trajectories of more projectiles from more rifles fired at more velocities. This is the origin of Applied Ballistics’ Custom Drag Models (CDM) and Hornaday’s Bullet-Specific Drag Models. Software based on these libraries, such as Applied Ballistics Elite, can output better distance compensation values than that which is based on G1 and G7 values because the underlying trajectory curves are those of the actual bullet in question. For more detail on these changes in ballistic calculation, Cal Zant did an excellent article on Bullet-Specific Drag Models and Frank did a couple interviews with Brian Litz and Emil Praslick for the Everyday Sniper podcast.
Additionally, the rangefinding software within commercial rangefinders has also shifted over time: first only offering a few stock options for preset ballistic curves; then allowing you to input your own G1 or G7 based ballistic profile that you had to, by guess and check, true to your actual field results; and now starting with a custom drag model and having a truing function within the software that eliminates the tedious guess and check truing. When using software with a truing function, you simply enter a few of your field results for recorded drop at a known distance and the software fine tunes the custom drag model, typically its initial velocity, to fit your data.
Background on How Laser Rangefinders Work
As with most tools in life, a better understanding of the principles behind, and idiosyncrasies of, the tool’s function often results in more skillful use and better outcomes. The purpose of this section is to help familiarize the reader with just what a laser rangefinder actually sees and how it analyzes and conveys this information to the user.
Though a variety of methods can be used to assess distances using lasers, the majority of laser rangefinders, including this one, employ a time-based calculation for distance. What this means is that the pulse is sent out and bounces back, and then the time between these two events is used to calculate the distance. This is easy enough in principle. In practice, however, we’re not talking about one laser pulse but many, and a variety of other factors also complicate this, so the resulting data requires some interpretation. The most important of these factors are beam dispersion, refraction, and background radiation.
Beam dispersion refers to the fact that the shape of a beam being emitted from the range finder is a cone, with the wide base oriented to the target, and not a rod. That is, the beam spreads out and covers more area the further the object being ranged is from the rangefinder. In addition, most rangefinders, this one included, emit a beam that is not round in cross section, but rather closer to rectangular.
In the case of this particular rangefinder, the divergence is .06 mils in the vertical by 1.5 mils in the horizontal. The Sig Kilo 10ks are unique in providing the user the ability to align this beam to the reticle manually within the BDX smartphone app. It is important that you do this as it is unlikely it will be ideally aligned out of the box, just as it is unlikely most other rangefinders will have a perfectly aligned beam. The difference is that you can align the 10k yourself whereas most others you just have to make a mental note on the alignment and live with it. For most makers, a pass for beam alignment on QC means only that some portion of the beam touches some portion of the reticle, not that it is properly centered. Indeed when tested, the beam on this 10k was just barely touching the edge of this reticle. To center it using the alignment function within the BDX software, an adjustment of -4 in the horizontal and +1 in the vertical was necessary. Being able to do this is much appreciated, as a small misalignment can matter a great deal when ranging small objects far away. In determining your alignment, you can quite easily see the beam with a nightvision system, as the rangefinder’s 905nm beam is in the spectrum the nightvision sees. However, if you don’t have nightvision, as I don’t, there are a couple of ways to figure out the alignment. The easiest is probably to find a nice, flat, small sign roughly the size of your reticle when its a couple hundred yards away and see how far right, left, above, and below, you can aim and still get the range of the sign. I did this with the below pictured rectangular industrial light and adjusted the beam increment by increment within the BDX software to center it. Remember, you can flip the binos upside-down or sideways during testing to be sure not to get returns from the post when you’re trying to find the bottom edge of your beam. Also of note when adjusting the reticle alignment on the 10ks, is that you handle the ranging within the program during the process and not from the binoculars range button.

In addition to alignment, it is also important to understand just how large a laser rangefinder beam will get at longer ranges. At this time, average beam dispersion for a laser rangefinder is something like 2 x 1 mils. This is 7.2″ wide at 100 yards, or 72″ at 1000 yards. With this pattern, if you are trying to range a target at 1000 yards, unless it is an elephant, much of that beam will be reflecting back from what is around and behind the quarry and not the animal or, more likely at that range, steel itself. Most of the time, a rangefinder may receive a signal comprised mostly of light not reflected off of the target. Data analysis will therefore be necessary to pick the target out from what is not target. Similar in effect to this, many targets are not perfectly flat and perpendicular to the rangefinder. Because the beam is broad at the target end, this means that what is reflected back will not be a single sharp signal but a number of different reflections at a number of different distances. If you aim at a hillside, for instance, some will be reflected off the closer bottom of the hillside, some off the further top, and some off everything in-between. A tree will also give a broad reading as it is a three-dimensional object with reflective parts and pieces throughout. What the rangefinder actually sees, therefore, is not to be represented as a single blip at a single distance, but rather a plot of many returns at many distances with a variety of peaks and valleys corresponding to distances at which a few (valleys) or many (peaks) of the laser pulses were reflected back. The rangefinder may carry out all the interpretation of this plot itself or it may allow the user some degree of control. In theory, a rangefinder could also present the entire plot to the user for interpretation, though I am not aware of any models that do this. This Sig 10k, with its pixel-based display, is one of the few that theoretically could, though it does not. It does, however, give you a large amount of choice in data analysis. The rangefinder’s menu includes modes for last (prefer far target), first (prefer near target), best (target with biggest returns), XR (prefer furthest target and more ranging pulses will be sent out over a longer time), and fog (different processing algorithm to minimize erroneous returns.) That is a good deal of choice, and given the excellent menu system of the 10ks, it is easy to access and utilize this function.
Refraction refers to the bending of light through mediums of differing density such as air or water. The pulse sent out by a rangefinder must travel though a great deal of medium before returning. This air will have a variety of different temperatures and moisture contents. It may also contain microscopic or macroscopic water droplets. All of this, as well as dust in the air, will serve to scatter or absorb the laser such that much of the beam will either not hit the target or not return. The effect of this will become more pronounced with distance at the same time that beam dispersion dictates that the beam is more spread out with distance. This works together such that the further an object is, the less signal could possibly be reflected off of it. At some range, therefore, the signal will not be strong enough to be distinguished from the last of your important factors. Additionally, if your rangefinder is of the higher power 1500nm variety instead of the more common 900nm variety (these Sig 10k binos use a 905nm laser), absorption and scattering become a much bigger deal. 1500nm lasers interact heavily with water and so become far less effective the more water is in the air.
Background radiation is omnipresent but varies greatly with atmospheric conditions. At night, if you could see the target to range it, you would not have much of a problem. On a bright day, however, the sun is introducing a tremendous amount of electromagnetic radiation that is reflecting, refracting, transferring energy to objects, and being radiated once again at different wavelengths. Some of this cacophony of radiation will be close enough to the wavelength used by the rangefinder to be picked up. This radiation will form a floor to the possible signal strength returned from the object ranged that could be read.
I have made the following crude diagram of what the user, and the rangefinder, might see in a particular contrived scenario in order to help the reader to understand the type of data a rangefinder might be interpreting. This is not strictly accurate as the rangefinder does not send one beam out and record a bunch of different returns but rather sends out a whole bunch of tiny pulses and records a return for each. In other words, the theoretical return plot I show is much smoother than actual data would look, though the shape is the same. I think this way of depiction is most useful in helping the user to understand what a rangefinder sees, though. It may also help the user, where possible, to present the rangefinder with scenarios where it might have an easier call to make. In other words, to aim to get better returns,sometimes, by ranging easier-to-read items near in proximity and distance to a small desired target instead of that target itself.
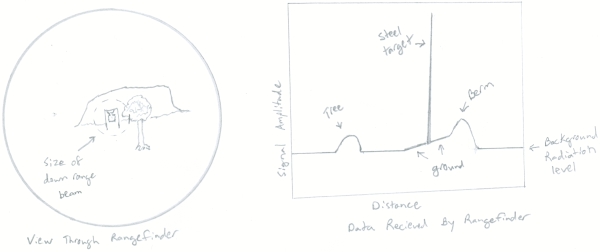
As you study the above diagram and plot, keep in mind the following possible ways in which the data might be interpreted by the rangefinder and how those interpretations would effect the user not only in this example situation, where the steel target is the desired object to be ranged, but in other scenarios as well: perhaps when ranging softer targets against hard or absent backgrounds.
1) A rangefinder might be programmed to display the closest peak in amplitude to the user. This would be the tree.
2) A rangefinder might be programmed to display the furthest peak in amplitude. This would be the berm.
3) A rangefinder might be programmed to pick the peak with the greatest area underneath. This normally corresponds to the object filling the greatest area of the diverged laser beam down range. In this example, this would be the berm.
4) A rangefinder might be programmed to pick the peak with greatest maximum amplitude. This usually corresponds to any object that is sufficiently large, reflective, and mostly perpendicular to the shooter. In this case, that is the steel target.
Most rangefinders are programmed to pick one of these criteria to determine the range from. A few have several modes you can switch between. These typically allow you to set preference for near / first target (tree), far / last target (berm), or highest number of signal returns / best target (berm or steel depending on specific criteria). The Sig 10ks have modes for each of these and these modes are easily found in the binoculars menu system under “Target Mode”
Unboxing, Look, and Feel:
The Sig Kilo 10K-ABS HD rangefinding binoculars come in a surprisingly small box snugged within the very nice harness system pouch included with them. This harness is a nice touch. It has quality ventilated mesh padding on the straps and clips on both the harness straps and binocular straps so that you can get in and out of the harness easily or remove the binoculars from it without unthreading the straps. These clips could also allow quick connect to an alternate simple strap but this secondary carry option is not included. The pouch part of the harness features a couple elastic side pockets and an open front pocket for a small note pad. The binoculars pouch is well sized for secure storage but quick retrieval, and is shaped to have a rain hood that serves to both retain and protect the top of the binoculars. It does not actually completely close, though, so it’s not going to be great at keeping out dust.
Also included with binoculars and harness are two batteries, a very helpful manual, and a wireless weatherflow wind meter that can be paired with the binoculars for wind readings. For those interested in what this or that screen looks like in the BDX program or how it is generally laid out, I highly recommend checking out the PDF of the Sig 10k manual. It is quite helpful and has images of pretty much any screen in the software.

The 10k binoculars themselves are the sort of blocky affair expected from most rangefinding binoculars. They are not particularly large, or heavy, but they are also not very ergonomic. There is really nothing to get a good grip on with a single hand, so they are hard to operate that way. The buttons are easy to get to, though, and with two-handed use, they are comfortable enough. Sig includes a tripod mounting stud in the front of the hinge behind a decorative Applied Ballistics logo cover for a steady tripod mount, and there is also just enough room in front of the large hinge to fit a cinch tripod adaptor. Given the extreme range capability of the 10k, and the longer duration XR target mode that enables this, a steady mount is a must. Just about everything on the 10k feels like is has sufficiently thick rubber armor over it: A good thing given the sensitive electronics being protected in a rangefinder.
The optical controls on the 10k are functional, but not great. The focus wheel is smooth, but definitely on the stiff side. Far stiffer are the diopters on each eye. These are certainly not going to inadvertently move on you, but between their stiffness and how touchy the focus is on them, expect for it to take some effort to get them tuned just right. Also expect to be pissed if your buddy messes with them. The eye cups on the 10ks are of the omnipresent twist-up variety and have three detent settings each. Eye distance from the lens is less than on most binoculars I have used. The eye cups are also significantly larger in diameter. They feel a bit too large, even with my Neanderthal brow. The 10ks are simply not sleek, comfortable, perfectly in tune with your body, bird-watching style glass. They are sort of bulky and uncomfortable, like most other rangefinding binoculars.
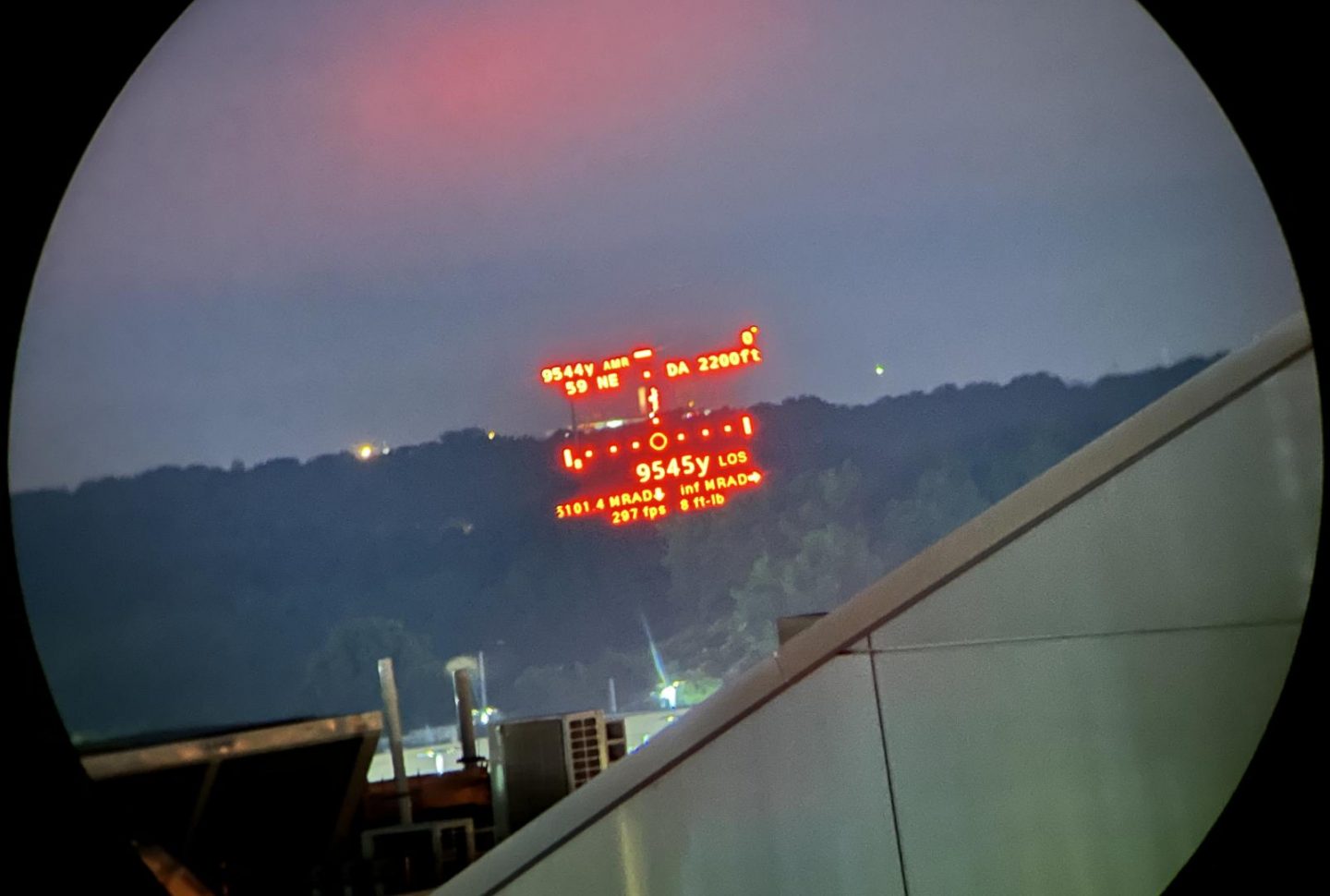
As with every other range finding bino I have encountered, the rangefinding display in the 10ks is in the right barrel only. This display is quite complete. As pictured below, you can see that the pre-range main display includes the bearing, density altitude, reticle, ballistic profile loaded, target mode, wind setting, and battery remaining. The screen brought up after ranging is equally complete and includes angle modified range, inclination, bearing, density altitude, reticle, yards to target, drop, windage hold, velocity of the round at target, and energy of the round at target. This incredibly complete HUD is made possible by Sig’s unique 304 x 256 pixel AMOLED screen. I should note that originally I thought the display in my test binoculars was canted a couple degrees counterclockwise. You will note that it appears so in all of my images. This is because I have a giant head. The display is leveled for the average, 66mm inter-pupillary distance. Mine is 75mm and adjusting for this tilts the display. This is more noticeable in the Sig than in other binos because it features long lines of straight text and also a reticle with a crosshair. There are no functional impairments resulting from this melon head induced display cant. Sig’s pixel-based display makes possible the excellent onboard menu system which does not need to use obscure three letter acronyms you will inevitably forget for everything. The menu makes it easy to utilize the binoculars without being connected to the BDX application in the field. This is even so when needing to use multiple ballistic profiles, as the binoculars have the memory to store thirty profiles. The displays and menu system are simply excellent. Remember this when we get to the blue tint in the optics section. All things in optics are tradeoffs.

Sig Kilo 10K-ABS HD ranging a person at >2k yards
Background on the Challenges of Getting Optical Performance from a LRF Bino:
Producing laser rangefinding binoculars of high optical quality is a difficult proposition. Nevertheless, this is a very important area of performance because the idea of LRF binos is not just to replace a small rangefinding monocular, but also to replace the binos you use to find and observe your quarry. For such purpose, LRF binos need a lot better optics than the small, dark, heavily-tinted view you get through a little handheld LRF monocular unit.
Amongst the difficulties faced in designing optically high performing LRF binos, foremost are the effect of the display on optical performance and how to integrate the laser optic components with those for visible light. You have some tough decisions to make when it comes to coatings as the laser transmitter and receiver are part of the optical system, in the right barrel. The laser wavelength used, 905nm, is just outside of the visible light spectrum. This laser light must both pass through and utilize much of the optical system used for the visible light traveling to the user’s eyes and be diverted from the rest of the incoming light at a point to be redirected to a receiver positioned in the barrel. Obviously, this is a coatings challenge.
The other main optical challenge of laser rangefinding binos is the effect of the display on optical performance. There is simply no way to put a display bright enough to see in the optical path without some diminution of transmittance. Furthermore, to a great extent, there is a direct tradeoff between how bright you can make the display and what percent of incoming light the binoculars can transmit to your eye. If you’re willing to have an image through the binoculars that is dimmer, or, say, blue-tinted, your display can be quite bright. If you want the image bright and untinted, however, you may have to go with less display brightness and probably simpler, larger, illuminated digits. The reason for this is that your display basically works by bouncing the display image off a lens in the main optical path. This requires some semi-reflective coating, as on a holosight or red dot. These coatings absorb light and the more you want them to reflect the light in front of them (for a brighter display) the more they absorb the light behind them (what you’re looking at through the binoculars). The challenge of light absorption of this nature is strong enough that two of the makers of optically superior laser rangefinding binoculars have opted for unusual choices in prism design, partially to counter the light loss. Leica, on its Geovid series, has gone with a Perger-Porro prism design, while Zeiss went with an Abbe-Koenig prism system. Both of these choices are far less common than the Schmidt-Pechan prisms found in most binoculars, including these Sig 10ks, and both offer higher light transmission.
Optical Performance:
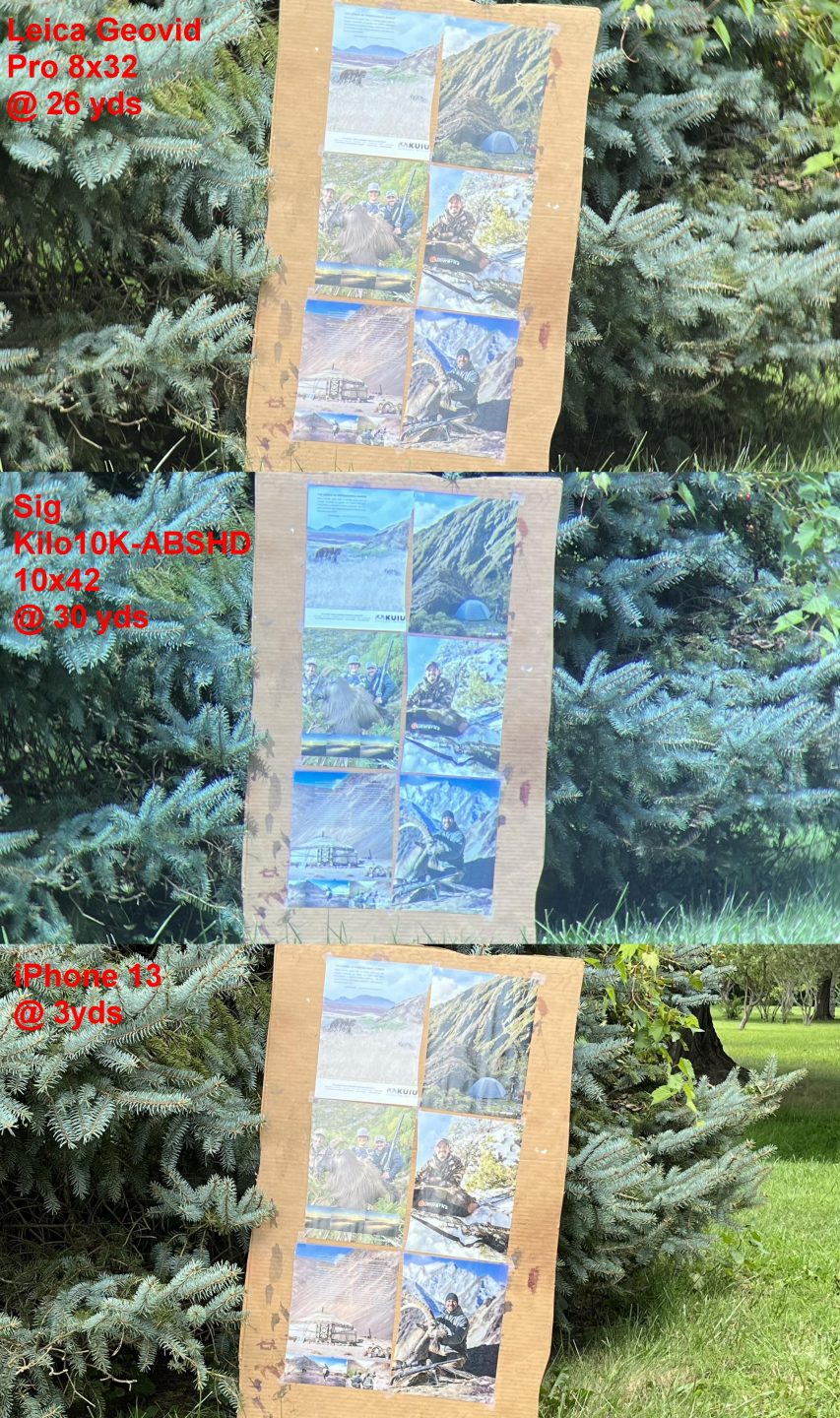
The first thing to talk about with regards to the Optical performance of the Sig Kilo 10k-ABS HD rangefinding binoculars is the obvious, and much discussed, blue tint. This is the first thing you will notice when looking thorough them. As mentioned earlier, the Sig 10ks feature an excellent 304 x 256 pixel AMOLED display unique in the industry. The flexibility of this display is what allows for the large amount of information displayed on the range screen and also the excellent menu system that allows the 10ks to operate so well in unconnected mode. This flexible display is also what allows the 10ks to have the reticle zeroing function that they have. Most other makers are not using a pixel-based display like this but rather a segmented one (think a 1980s digital alarm clock) which can be much brighter, but is quite limited both in the amount of information that can be displayed and the flexibility of that information. The downside of the Sig 10ks robust display is that, because it cannot be made as bright, a more reflective notch filter is needed to reflect the display to the user’s eye. The result is that the image is tinted noticeably blue. This is a direct tradeoff. You want the robust pixel-based display that is also bright enough to easily read, you get the tint. This tint is, of course, an obvious and substantial color distortion. I don’t think you will be going bird watching or to the theater with these puppies. From the design standpoint of being a hunting and shooting sports tool, there are likely a lot of users who will not mind though. More important than the color distortion is the possibility that the tint might somewhat decrease the contrast you can make out. I’m really not sure about this. The Sig does have a bit less contrast than say, the Leica Geovids, but those are just optically better all around. I’m not sure that the narrow notch filter that makes things look blue in the Sig has anything to do with it. My overall impression of the tint is more that it is basically cosmetic. When it comes to low light function, the blue tint does not actually appear to be blocking much light. The image certainly looks darker, but in reality, this is more perception than actual reality, as the optics performance in low light does not seem appreciably lower than the competing Vortex Fury 5000 when it comes to continuing to make out images in lower light. Lastly, many have said that blue tint does seem to have the upside of cutting down on glare. I suspect that as with the low light effect, this may be more perception than reality. The notch filter creating the blue tint seems to be quite narrow, affecting only a small range of wavelengths. It is more cosmetic than anything, however very obviously cosmetic it is.

So, just how blue is the blue tint? I’ve actually had a good bit of difficulty coming up with a set of photos that I think fairly represents this. The below combined image was actually the result of my fifth attempt at such a comparison shot. The earlier attempts all proved either too overwhelmingly blue, or not enough blue to give what I considered an accurate impression. As you can see, I eventually opted for a synthetic photo montage subject with a natural backdrop. Generally, you notice the blue most with light solid color backdrops or against sky and notice it less when viewing darker and more varied color natural objects. The reticle alignment photo early on for instance, looks really blue. The Great Blue heron photo above does not seem tinted at all though. Hopefully, by providing this range of different photos I will have done a good job of conveying the impression of actual use as well as possible.
To test the optics of the Sig Kilo 10k-ABS HD 10×42 rangefinding binoculars I compared them side by side with Zeiss Conquest 10×42, Vortex Diamondback HD 10×42, Vortex Fury 5000 10×42, and Leica Geovid Pro 8×32 binoculars. I really wasn’tsure where the Sigs were going to land in terms of optical performance because the tint was unusual enough I didn’t really trust my initial impressions, so I cast a wide net. Shout out to the good folks at Cabela’s for allowing me to set up some optical testing instruments outside of their store to facilitate this. It turns out, I was right to suspect those impressions as the 10ks performed better than I thought. One other note, I suspect that particular pair of Vortex Furry 5000s were not collimated as well as they should be: Both eyes weren’t syncing up as easily as they should be with that pair and I felt some strain and discomfort with substantial time behind them. Take the comparison between them and the Sigs with that caveat. This was frustrating, as it ended up the most important comparison and I don’t completely trust it.

Obviously, there is a good deal of difference in the optics I was comparing in terms of price, and because three of them are also rangefinders whereas two are only binos. Lastly, the Geovids are 8x32s instead of 10x42s. Unsurprisingly, given the huge price range, there was a good bit of difference in performance and some clear brackets. Setting aside the blue color of the Sigs for the purposes of comparing other aspects, the Leicas are better than the Zeiss Conquests, which are a little better than the close-running Sig Kilo 10ks and Vortex fury 5000s, which are both substantially better than the budget Diamondback HDs.
Looking up from the Sigs, the Conquests were really just a bit better in just about every aspect. Resolution, DoF, chromatic aberration, FoV, and edge-to-edge clarity were all just a bit better on the Zeiss than the Sig 10ks. When compared to the closest competitor, the Vortex Furry 5000s, the Sigs had substantially less chromatic aberration, a slight advantage in edgetoedge performance, an even slighter edge in resolution, the same FoV, and a good bit less DoF. Over the budget Vortex Diamondbacks, the Sigs had better resolution, far better edge-to-edge performance, and better FoV, despite what the published specs in this regard claim.
This brings me to my overall thoughts about the optical performance of the Sig 10ks in the limited context of hunting and shooting sports for which they were designed. In such context, they are mid-ranged optical performers: Clearly better than the sub ~$500 budget binos and also clearly not competitive with ~$1k+ glass. The Sig Kilo 10ks are also quite close in overall performance to what may be their closest overall competitor, the Vortex Fury 5000 laser range finding binoculars.
Laser Performance:
I’ll admit to having my doubts when I read 10k in the product name of these binos. 10,000 yards is simply a lot more than competing 905nm laser products. Quite frankly, though, they will do it. It took me a long time in near flat, tree-covered Ohio to find a place you could see far to test it, but eventually I got a sight line on the Budweiser factory from a parking garage at 9,545 yards, and the binos ranged it every time. To be fair, it was night, but we’re looking best case scenario here in every way. During the day, the max range is certainly less. For instance, I could not get a well-defined bridge abutment at 6,000 yds no matter what I tried, even on a cloudy day. Still, they justified the 10k model name, and their other range claims were achievable in daytime overcast conditions.
Now, the question of how Sig is getting remarkable range accomplished. That comes down to a combination of four factors. The first is that the Sig Kilo10K-ABS HD binoculars are not a class 1 laser product. They are a class 1M. What this means is that the laser is simply more powerful than a class 1 eye-safe laser and is eye-safe only if the beam is not focused. So, sort of eye-safe-ish: Safer then the class 3R found in a couple handheld rangefinders, but a bit less than the pure class 1 found in most consumer rangefinders. You really shouldn’t point any laser rangefinder at anybody’s eye anyway, I might add. At least not at close range. The second factor in the 10k’s impressive performance is the longer duration, larger space between laser pulses, XR ranging mode that can be chosen in the target mode menu setting. The unique 1.5x.06 mil beam divergence vastly minimizes the vertical beam divergence resulting in typically stronger signal return spikes. Lastly, the 10ks have excellent signal processing. When all of these factors are combined, you get some maximum distance results that are frankly multiples of what competitors products are doing.
Ranging a huge factory building at night nearly 10,000 yards away is impressive, and makes for a nice round number in the product literature, but you are probably more interested in what it can range smaller squishier things at during the day. As you saw in the photo earlier, the Sig 10k can range a person past 2,000 yds on a cloudy day. I actually got as far as 2100, at which point the binos started to return only the treeline behind at 2,300 because the 1.5mil wide beam was hitting so much more tree than person at that point. I am truly impressed with this result, though, especially when you consider how relatively narrow a person is at that range compared to the beam width. That is some really good signal processing. As for treelines, I got as far as 3,700 in lightly overcast conditions and >5k at night. Grassy gentle hillsides were a big focus for me, as my great hope was that the very low .06 mil vertical dispersion would mean you could clean up ranging even gentle hills under targets. In this regard, I was a little disappointed. The Kilos are a good bit better on treelines than gentle grassy hills. Even on hills well aligned horizontally with the ranger, you could start to have issues as near as 2,400 yds. In other words, if you’re trying to range a 3,000 yard ELR plate that is on a gentle grassy hillside, you may have problems hitting the plate because the plate itself is just too small relative to the beam width, and the hillside its on is just not steep enough to produce a strong enough return. This is not to say the Kilo 10ks are not hands down the best 905nm laser rangefinder for ELR. They are unquestionably that. You just still might not get a range on the furthest ELR targets. Of course, from what I can gather, only a few ELR matches go past 2,500, and I expect you will reliably get ranges at that. Keep in mind I’m not an ELR shooter myself. I’m doing my best to give you educated estimates of what you will find based on performance in similar situations.
While testing the ranging performance of the Sig Kilo10k-ABS binos, I often compared them side-by side with the Leica Geovid Pro 32s I reviewed earlier this year, as well as and original Vectronix Terrapin, so long considered the benchmark for handheld rangefinding units. Beam divergence on the Leicas is 1.2 x .5mil; the Terrapin 2.4x .4 mil; and the Sig 10ks are 1.5 x .06 mil. Inside of 1,000 yds, both these Sig Kilos and the Leica Geovids basically ranged everything you pointed them at, whereas the wider beam Terrapin occasionally had trouble. Both the Sig and Leica are also super fast at returning a range, with the Sig being perhaps slightly faster. They are both tremendously faster than the Terrapin. Past 1,000, you start to get some performance divergence. Basically, the Sig 10ks will range about 1.5x further than the Leicas on small soft targets and hillsides, 2x further on tree lines, and more than 3x as far on big hard targets such as buildings. At no point was the Sig unable to range a target that either of the other two could range. Unsurprisingly, range agreement between the three rangefinders was quite high, generally within 1-2 yds. For our purposes, the accuracy of range returned is just not a problem with current rangefinding technology. Remember, much of this technology was originally developed for industries where inches matter.
Sig’s advertising materials tout that the Kilo10K-ABS HD will range deer @ 3,000 yds, trees @ 4,000, and max reflective @ 10,000. I believe this to be accurate with the caveat of overcast conditions for the first two and night for the third. That is some pretty impressive stuff. Clearly, the 10ks are the most effective 905nm rangefinding product available.
Other Onboard Sensors:
Of course, a laser rangefinder is not the only sensor in the Sig 10ks. There is also an atmospheric pressure sensor, temperature sensor, humidity sensor, angle of inclination sensor, compass, and optional wireless wind meter. Some of the appeal of an all-in-one rangefinder and ballistic solver is that all these sensors can be automatically integrated into the calculations for great accuracy and speed. To do this though, the sensors have to be reasonably accurate, so I tested them. With its remarkably thorough display, much of this data shows up to the user while ranging. What does not who up is visible in the smartphone app when ranging in connected mode or under the onboard sensors section of the excellent menu system in the binoculars. I found over several different sessions that the temperature sensor was always within the range about five degrees of the local weather data from the airport quite near my home. As many have noted, the temperature sensor is very slow to adjust, taking 20 min or so to acclimate to its location. The atmospheric pressure sensor appears proportionally even more accurate. Together, these sensors yield DA readings that agree with those of the airport within 500ft or better. That seems pretty good to me. Incidentally, there is also a relative humidity meter on the 10ks that they may have added into this equation as well, though it has little effect on the result. Relative humidity can be pretty micro-location. Based on that, and the relatively small effect it has on calculations, I didn’t test its accuracy. The Sig 10ks also have an angle of inclination sensor. This tested within a degree and a half or so of correct, which seems more than sufficient to the purpose. The 10k’s compass is less impressive. Subsequent measurements taken of the same point often vary by as much as 10 degrees, and these measurements typically do not even center in their distribution around the correct bearing. There is no pattern to this. Some directions it is erroring left, some it is erroring right. More on this in the BaseMap section, but it is important to note that an inaccurate chip size digital compass is not an issue unique to the Sig 10ks. Cell phones include this same technology and have the same issue. Tiny little chips just don’t measure the earth’s magnetic field very well.
As mentioned before, the Sig Kilo10K-ABS HD binoculars include a WeatherFlow wind meter. This can be paired with the binoculars during the pairing process with the BDX phone application. Once paired, you can incorporate its readings into the ballistics calculations by simply turning it on while ranging with the binoculars. The BDX application does not have to be in use for the WeatherFlow meter to communicate with the binoculars after pairing. Activating the WINDmeter while ranging by pressing its single button will bring up a small wind icon on the ranging screen and replace the wind magnitude in the calculation with the magnitude read by the meter. However, it will not replace the wind direction. The WeatherFlow meter does not know what way you are orienting it, so you must orient it correctly if you want the calculations to be correct. You must orient it in the direction the wind is blowing and also in the direction you have selected and input into the binoculars. I will also mention here that the communication range of the WINDmeter is limited to a couple meters and it can be a bit spotty at maintaining those communication as well. I tested its wind metering only in so far as I verified that the calculations were changing. I did not test the accuracy if its readings. It is notable that the binoculars do not actually give you the wind speed value they are reading, but rather directly change the amount of wind drift in your ballistic solution. I didn’t like this limitation. I would have liked to be given a live feed of the current wind speed reading, as it changes all the time, and I would like to know the relative range of speeds it is moving through.

GPS Mapping with BaseMap:
With this generation of laser rangefinders, Sig and a few other makers have introduced the ability to mark the location of a ranged point using BaseMap GPS software. This feature requires the paid subscription Pro version of the software, currently going for $35 a year.
The biggest goal of remote marking is to help the hunter to find the start of a blood trail. Often, after an animal is shot, it often goes some distance before it dies. Because animals do not understand what being shot represents, they do not usually go far if they are not actively chased because they neither understand they are dyingor that they are being hunted. They just feel hurt, then weak and tired. As such, after delivering a shot, hunters typically lay low and wait a while to start tracking the animal so that it will not likely go far before bedding down and dying. It is therefore quite helpful to have an accurate point to start your search for a trail but this is not so easy when the game starts 500yds from you and you have to wait a while before starting to track it. Things can look a lot different standing in a field than looking at that field from 500yds. It can be hard to find your starting point, and that is the main idea behind dropping a remote GPS point on it.
Prior to doing this year’s rangefinder reviews, I had not noodled with the BaseMap software at all. I had heard of it from people using its satellite map to estimate ranges to targets by bringing up a map of the range and dropping points on the map where it thought the targets were, but I hadn’t actually tried it. I found it a slick software package and have used it a number of times not in conjunction with testing rangefinders. It has lots of functionality around creating routes, measuring distances, and marking campsites, gear drops, and other important points. BaseMaps is also designed to be used without access to a cell phone signal. This is an important consideration, given that the locations having the best hunting and hiking rarely offer cell service. This also gives the Sig Kilo 10k, and other makers’ products that interface with BaseMaps, the advantage of working without cell service, whereas Swarovski’s similar feature uses its own proprietary software which requires a cell signal. Most importantly from the standpoint of my use, BaseMaps interfaced quite easily with the Sig binos.
Within BaseMap, mapping points while ranging them is found within the BaseMap software under tools and is called “Remote Marker”. Once you have paired your binos to the software, hitting this function will prompt you to range what you want to mark. When you range, the point will show up on your map with a line from where you are standing to the ranged point. You can then choose to place a marker at that point, manually adjust the marked point’s location, or just dump the point. The software uses three data inputs to decide where the point should go. These are the user’s location as determined by your phone’s GPS, the distance and angle of the point from the user determined by the binos, and the Azimuth of the binoculars, determined by the compass in the binos. The accuracy of first couple of inputs are generally quite good. Typically, outside the GPS is good to within about 3yds, the range within 2yds, and the inclination within a degree and a half or so. In my testing, however, the Azimuth was only good within 20 degrees or so. This translates into quite a lot of error as the distances increase and boy can these Sig Kilo 10ks range a long way.

Fortunately, this is not a random error and we are not talking about an area of uncertainty as much as a path of uncertainty. There is very little uncertainty in either the user’s starting location or the distance of the target from the user. Therefore, you can pretty easily mark out an arc-shaped path of possibility and just walk it from one end to the other. You can do this by ranging and marking the same point 5-10 times. All those points will line up on a gently arcing path. Its no nice, clean, single pinpoint, but it is still a tremendous aid in helping you find the animal’s trail. Keep in mind that when I did my testing of this feature, more than half the time the correct target location did not actually lie within the bounds of the 10 points I dropped so when you are following the arc made by the points you dropped, you will likely need to extend past the furthest point in each direction in order to reach the target location you ranged. Frankly, the software should probably just mark an arc for you on the map instead of a single point. This would save you from having to mark the same point 5-10 times, and, I believe, this is what Swarovski actually did. The little chip-sized digital compasses in these and other competing binoculars just aren’t very accurate.
Ballistic Software:
All of Sig’s BDX rangefinders and scopes use the same BDX master app whether they are based on AB elite or AB Ultralite. The App’s startup screen is indicative of the breadth of stuff the app is intended to do, having sections for the different devices you have paired with the app, as well as your ballistic profile creation section, the pairing menu, and a couple informational sections. Note that the video and manual section is actually just a hyperlink for your web browser. This is a bummer as it doesn’t work offline, and I suspect more than one person has really, really, needed it to do so while on a hunt. Note to Sig: our phones have enough memory. Integrate the manual into the app so it works offline. It is an excellent manual by the way. The only thing strange about the startup screen for the BDX app is that it is not totally clear what to select when using the rangefinder in connected mode. This is under the rangefinders tab, which makes sense, I guess, but it does feel a little like that tab might be just for rangefinder settings, which it also does. It might be clearer if this was the top tab instead of the fourth since it certainly feels like the option you use all the time should probably be the top one.
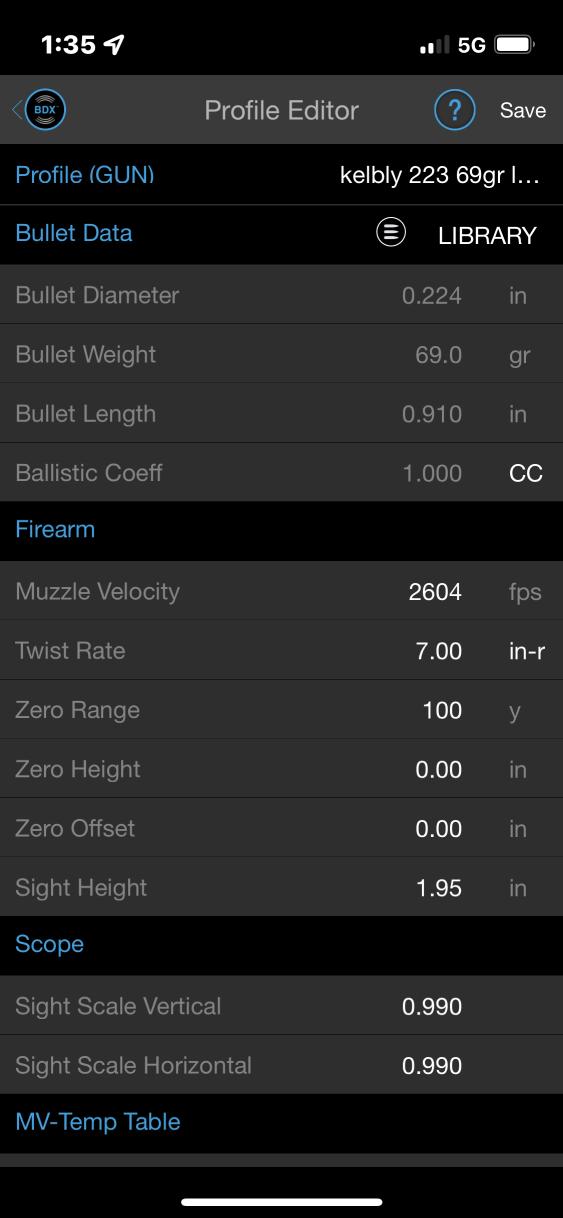
As the Sig Kilo 10k-ABS HD comes with Applied Ballistics Elite, and my basic assumption in this review is that is what you’re going to use. I should note though that the binos do have other ranging modes, including LoS, AMR, external ballistics (for Kestrel or external device calculations), and even a new Archery mode (for high angle long distance archery shots). With Applied Ballistics Elite, the BDX application has a few more options in the Custom Profiles section than those using this application with a rangefinder only equipped with AB Ultralite. These include access to custom and personal ballistic coefficients within the AB library, adjustment for twist rate, sight height, sight scale (quite important as most scopes adjustments are a little off in adjustment magnitude), some velocity scaling for temp, and a few other offsets you will probably never use. Of course, it also gives you ballistic solutions for >800M shots. You will note that there is no section in the ballistic profile screen for truing muzzle velocity to field data or adding a drop scale factor for supersonic to subsonic transition. These functions are actually accessible from the live rangefinding screen and only work with ranges you have just taken, live. You cannot input previously recorded data. This is not my favorite choice. I would like to be able to more easily mess with these things when not at the range and be able to both mess with them and the range card to see how the data is lining up with my field-recorded data. While I can certainly still mess with the muzzle velocity in the old-fashioned, non-automated way, there is no other way to access the drop scale factor. If I, a person who really doesn’t shoot past supersonic much, want to do that, I am sure the ELR guys do as well, and lots of them are going to be looking at this product. Make it so we can manually enter this stuff and futz with it. This inability to use the truing function unconnected from rangefinding also makes it too cumbersome to be feasible to true both BC and MV. This is something that you can do without too much difficulty only if you have an automatic truing function for one of the two. Lastly, I should note here that the same system exists in the BDX software for truing MV (though not DSF) for those with only the Ultralite version of AB. AB Ultralite does not usually include any automated truing function. That, coupled with some integration with atmospherics, is probably why truing is a roundabout system on the Kilo 10k, even though is comes with AB Elite. I still want to be able to easily manually mess with this stuff, though, and therefore disagree with Sig’s choices in this regard.
Another note on the Sig BDX MV truing system is that, at this time, it doesn’t actually work. When I trued a 5.8 mil correction at 624yds to 5.5mils, the program spit out a 3246fps MV as the corrected MV. This MV results in just a 3.4mil correction at 624yds and not the correct, 5.5mil one. So, way off and not even internally consistent. I had found this same glitch in the AB software before when doing the Leica Geovid Pro review a couple months ago and convinced the software team AB uses to fix it in the Leica iteration of the AB software. Evidently, they did not also fix it in the Sig iteration at that time. I expect it will get fixed now, though! It only took a few days to fix in the Leica app when I pointed it out before. Bug fixed 9/26/2022. Note: For the fix to work on an existing ballistic profile you must change something substantial in the profile so that it gets overwritten in the binos. Switching the bullet to a different one, syncing, switching back, and syncing again fixes it.
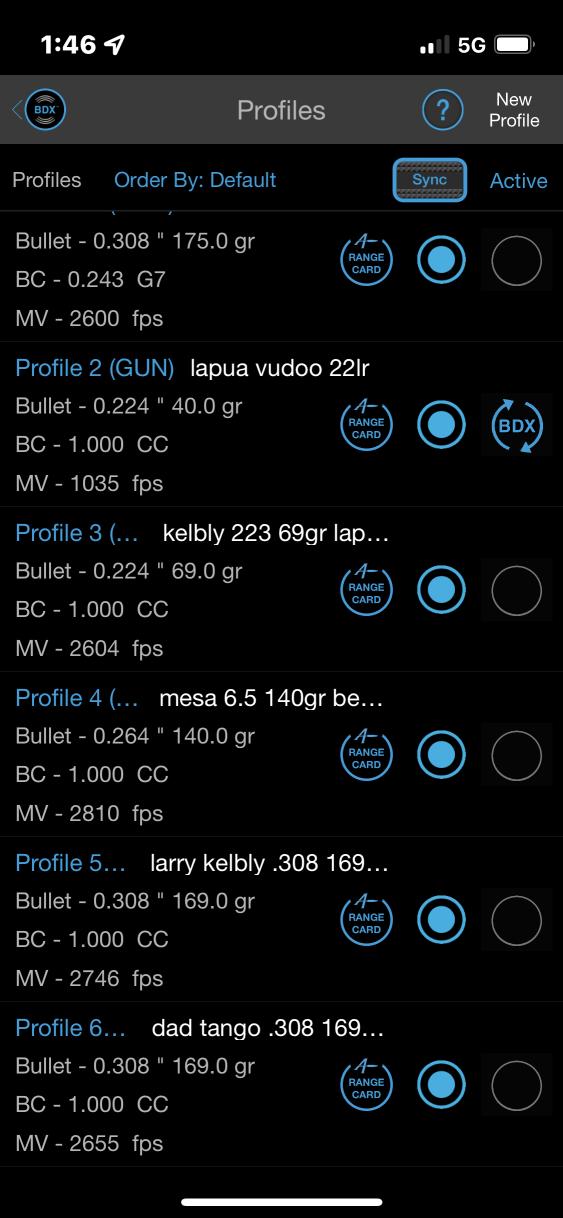
The Sig BDX application gives you a good deal of control as to what and when you sync information with the binoculars. This gives you the ability to hold more profiles within the app than the 30 that can be simultaneously in the binos. Because of the Kilo 10k’s large display capacity, a large amount of text can be displayed for each profile name, making it quite easy to keep track of which one is which. You never have to remember just which data is stored under some generic ‘Profile 1’ designation. I’m telling you, the menu system in the binos is so good you will rarely feel the need to connect them to the app.
It has been a few months now since I last poked around in the AB personal data model library when I was doing the Leica Geovid Pro review. At that time, there were basically just hundreds of redundant profiles for the same couple of bullets. AB has added quite a lot of profiles since then and there is now a good deal more variety t. While there are still a huge number of 6mm Berger profiles, I now see quite a number of ELR focused profiles, a great deal of .22lr profiles, and a meaningful number of profiles in other calibers as well. The AB guys have been busy this summer and the choices are really starting to add up. They now also include a lot of rounds for which a “custom” profile had not been made. For these cases, they are effectively that profile. These personal profiles are really starting to prove their value. I’m especially excited to dig though the .22lr profiles, as the AB “custom” one was not a great match for CenterX in my Vudoo.
Summary and Conclusion:
The Sig Kilo10k-ABS HD laser rangefinding binoculars have a lot of superlatives and I think we should start the conclusion by talking about those. The most important of these is without question its best-in-class ranging capability. Between its powerful class 1M laser, long distance XR ranging mode, signal processing, and tight 1.5x.06 mil beam divergence, the Kilo 10ks can handily out distance all other rangefinding products in the 905nm class. They really will hit 10k yds on giantreflective targets under idealized (night) situations. Just as impressively, during the day they can hit tree lines at 4k, and even squishy humans beyond 2k. This bodes well for their performance on the squishy furry mammals you actually intend to shoot at, but which are less keen to stand out in the open 2k yards away from me to help me test rangefinding products. Quite frankly, the 10ks will range multiples of the furthest distance you would ever actually take a shot at an animal at. Far enough to be confident in their suitability for close to, if not all, the shots the ELR guys seem to be taking in competition these days. In addition to sheer power and tight beam dispersion, the Sig 10ks also sport multiple target modes, allowing the user to maximize the signal processing for particular situations. It ranges smaller closer objects quite effectively as well. I was never able to get any target with the other rangefinders I brought to test next to the 10ks that I was not able to also get with the 10ks. These were not slouch rangefinders either – they were two of the best. The 10k’s signal processing is both good, and fast. Ranges are returned and ballistic solutions given virtually instantly, and re-ranges are super quick as well. Competition shooters will be pleased.
Perhaps even more pleasing to competition shooters is the Sig 10k’s best-in-class display and in-bino menu screen. The 10ks sport a unique 304 x 256 pixel AMOLED display instead of the more common segmented displays. This allows for a single, near instant, detailed post ranging screen with all your ranging, ballistic correction, terminal energy, and atmospheric info on one screen. It also allows for an excellent, in-bino menu system with whole words and detailed options such that the experience using the binos unconnected to the app is robust and fulfilling. Lastly, you can zero the aiming reticle so it actually centers on where the beam goes.
Included with the Sig Kilo10k-ABS HD laser rangefinding binoculars is Applied Ballistics Elite. This software, widely considered best in its class, gives you access to the highest number of bullet-specific ballistic models, as well as robust options for inputting your platform’s specifics, such as your sight scale factor, twist rate, and other relevant information for yielding the best initial model. Unfortunately, Sig has ridiculously locked both the automated muzzle velocity and drop scale factor truing behind a tedious wizard that only works when actively ranging. I’m sure I’m not the only one with a lot of existing data on a lot of existing loads that I wish to be able to true up before I get to the range. Sig has also locked out the truing function for use under 300yds, limiting its usefulness for subsonic or almost subsonic cartridges such as .22lr and the straight-walled hunting cartridges now being used in most of the eastern U.S. Not a good choice.
A more mediocre aspect of the Sig Kilo10k-ABS HD laser rangefinding binoculars is their performance as binoculars. Like most rangefinding binoculars, they are blocky and uncomfortable to hold, especially one-handed. The eye cups are a little too big, and the feel of most adjustments is stiffer than ideal. They do not feel like using a pair of nice birdwatching binoculars. The optical performance of the 10ks is likewise mediocre. Most obviously, the user first will note the blue tint. A consequence of the harsh notch filter necessary to make the excellent pixel based display work, it gives the image an obvious blue look. In reality, this is more cosmetic than genuinely optically problematic. It doesn’t seem to be hurting performance in low light, so it must not really be blocking much light. Otherwise, the 10ks perform pretty middle of the road optically – somewhere in the range of what I would expect from $500-$750 pair of non-rangefinding binoculars and similar to the performance of the competing Vortex Fury 5000 laser rangefinding binos. The 10ks are not optically competitive with the laser rangefinding binoculars of those three European brands, but they are also not optically poor. They are optically mediocre, like mid-priced hunting binoculars, but with the best rangefinder short of $10k in them.
The Sig Kilo 10k binos carry a 5-year warranty on the electronics and a transferable forever warranty on the optics. Sig has included a lot of extras with the 10ks. A comfortable bino harness, wireless wind meter, and extra batteries are all nice additions. The Kilo 10ks are also part of Sig’s BDX 2.0 ecosystem and can therefore be paired with a BDX scope in order to display drop corrections for targets ranged with the 10ks directly on the reticle in the scope. I’ll be looking at this system as a whole in the coming months.
Addendum: Laser Rangefinders, Snow, and the Sig 10k Fog mode
A while back I had a question from a member on laser rangefinding use in the snow. Of course, it wasn’t winter then so I could do little but look it up. For this I went through some white papers on the topic of which this paper had the best information on the effects of snow on both 905 and 1550 nm lidar. Most consumer units, including both the Sig 10k’s and the Leica Geovid Pro’s are 905nm but a few of the $5k+ units such as some from Steiner and Vectronix are 1550nm.
Reflectivity of snow on 905nm light is quite high. Not quite as high as visible light, but similar. The same article also indicates that the military grade LRF 1550nm light is simply virtually totally absorbed by snow and returns essentially no signal at all. In the case of 905nm such as the Sig or most commercial RF units use though, you will get a great signal return from this reflection. Twice what you get from bare earth. That being said, stray 905nm ambient light is relatively common from the sun. This will also be quite effectively reflected by snow. So, you should expect both the signal and the noise to be higher in the case of the use of 905nm LRF units in the snow as compared with snow free conditions. I would therefore expect that in low light, you will actually be able to range further on snowy hillsides than snow free but in bright sunlight you would not get results as far. I would also expect 905nm laser rangefinders to have trouble when it is actively snowing. As for the 1550nm units, they are going to suck in both conditions.
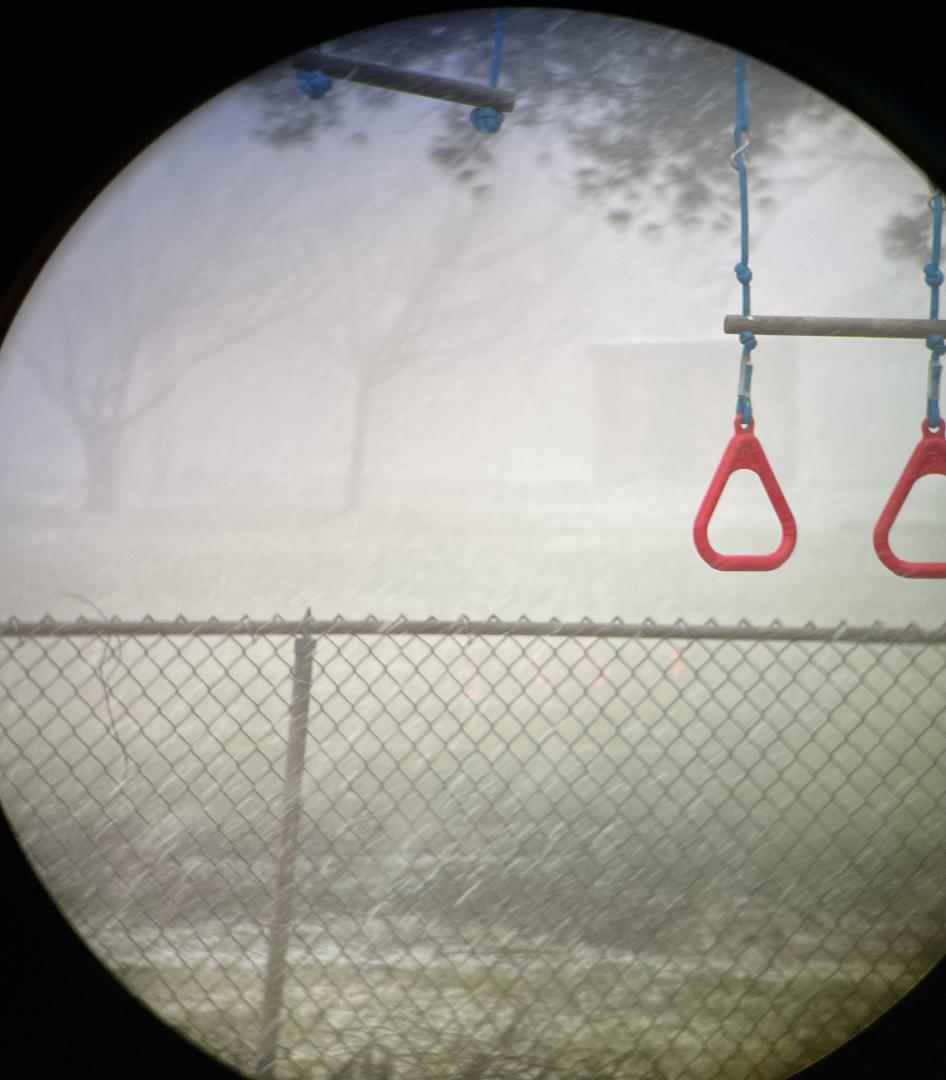
This week I was able to test these hypotheses out in both light and heavy snow with both the Sig 10k’s and Leica Geovid Pro’s. Here is a qualitative but not quantitative summation of my experience. Keep in mind that snow conditions constantly change minute to minute and second to second. There is really no way to do this in a quantitative way. I think that the experiences I will relate are nevertheless helpful.
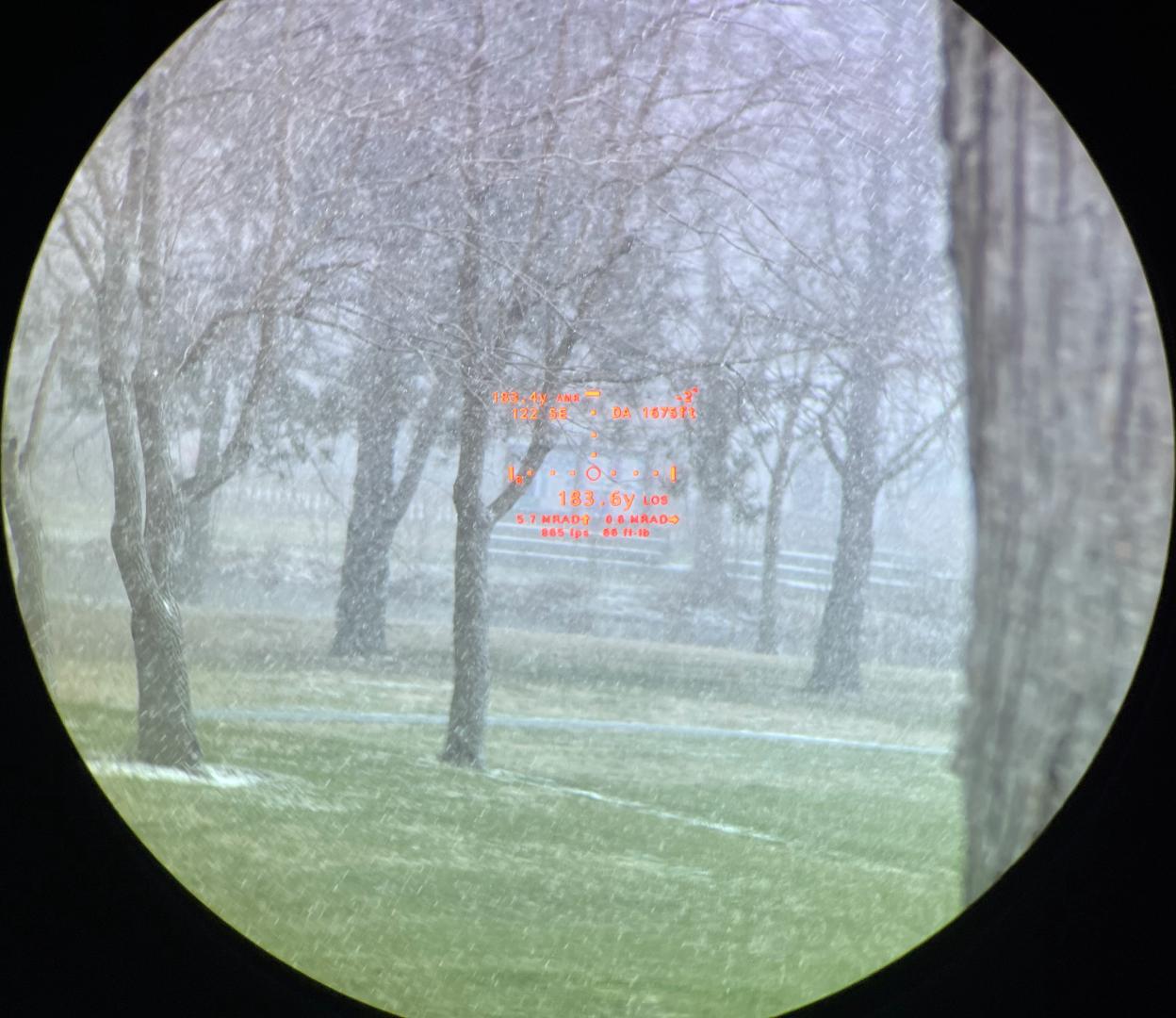
With Snow actively coming down, both units experienced dramatically reduced range. They do tend to return a range however. It’s just wrong and short. They like to throw distances of around 30yds regardless of what your pointing at. The Leica has only one rangefinding mode and so you really can’t fiddle with anything on this. It just doesn’t range well with snow coming down. The Sig 10k however has a “Fog” mode that clearly should be renamed “Fog / Snowfall”. Utilizing this mode it’s performance is dramatically improved and it can sometimes range targets I cannot make out though the snow such as a privacy fence at 245yds. I know where this target is and how far because I range off my back porch all the time but I couldn’t actually see it some of the time I was ranging it with the Sig 10ks on Fog mode. I don’t think there is any real rule of thumb I can give you on the limitations of the Leica or Sig in standard mode except to say that you will still be able to make out some targets though snowfall that are well within the normal rangefinding capabilities of the unit but that you cannot range due to the snowfall. This is not so with the Sig 10k’s in fog mode. They appear to be able to range more than you can see through the snow anyway. So, if you see game that is in range, you will be able to range it. I’m sure your overall range capability is dramatically reduced, but so is your visibility so your not really loosing anything. If you can see it, you can range it. It doesn’t really get any better than that. Fog mode is a game changing feature for folks hunting in the snow.
As for ranging snow covered ground, both units didn’t seem to have any problem. I’m sure if it gets whiteout bright enough your going to see some reduced maximum range performance like you would have in bright sunny desert situations from reflected solar interference but in the overcast snowy conditions I had I was getting totally snow covered hillsides fine during lulls between the flakes. I might add I would expect no return from a 1550nm laser in these conditions as absorption by snow in the first few inches is far above 90%.