Table of Contents:
1) Introduction
2) Unboxing and discussion of ergonomics
3) Optical testing
4) Background (how laser rangefinding works)
5) Rangefinding testing
6) Discussion and Conclusion
7) Ballistic computer and readout
8) Summary and Conclusion
Introduction:
This year at Shot I was so taken with the prevalence of, and advances in, laser rangefinding, that I wrote an article on the subject to help condense my thoughts and opinions. One of the results of this article was that the Bushnell rep pointed me in the direction of their new Fusion 1 Mile ARC line of rangefinding binoculars. I missed these at the show because Bushnell’s booth is a sprawling metropolis filled with products, most of which I have no interest in, displayed in a manner that is rather overwhelming. I might add that most other metropolises also fit this description. After looking over the Fusion 1 Mile ARC spec sheet the rep sent over, I thought the binoculars worth a look. The price, features, and range all struck me as very appealing.
Unboxing and Discussion of Ergonomics:
The fusion one-miles come with a case and cleaning cloth that are rather perfunctory, but also with straps and flip up lens covers that are quite nice. The size and weight of the binoculars are substantial. This is not unusual for the class. Actually, they are lighter than most rangefinding binoculars. Nevertheless, the size was a bit larger than I expected. Upon further inspection, it appears that Bushnell was able to base all three of their designs (8×32, 10×42, and 12×50) on the same housing. This is good economy of design given the cost and difficulty of marrying the optical and electronic elements of rangefinding binoculars. However, this housing is the size you would expect on a pair of 12×50’s. It feels and looks a bit big for 8×32’s and my finger was not long enough to reach the focus knob from normal grip position. The reach to, and stiffness of, the focus knob is the largest and most constant ergonomic complaint I have from using these binoculars. The grip felt good in hand and the rangefinding buttons were well placed. The eyecups on these binoculars are the now ubiquitous, and for good reason, twist up style and worked fine. Each eyepiece has a diopter in front of the eyecup. On the right eye, this is for focusing the rangefinding display; and on the left eye, this is the normal diopter for adapting the binocular to use by an individual with dissimilar vision in right and left eyes. Both of these diopters worked fine, but were non-locking and moved too easily. I accidentally knocked the display out of adjustment several times during the course of the review. All in all, the ergonomics were functional: something that can’t be said for some rangefinding binoculars I have used in the past. I would not, however, call the design ‘polished’.
Optical Testing:
The most general thing that can be said about the optics of the Fusion 1 Mile ARC’s is that they are good. In order to get a benchmark I compared them to my old Nikon Venturer LX (now called Premier) binoculars and a now defunct set of Nikon Mountaineers. I will not go into a tedious point-by-point comparison of all binoculars involved. Rather, I will give a more general summary based on the comparisons I made and extrapolations thereof.
The one-mile ARC’s did not perform to the optical standards of the Venturers by any measurement (field of view, depth of field, brightness, color, distortion, or resolution), but bested the Mountaineers in almost every area. I don’t think the fusion one-miles would optically best well chosen, midrange (say $500), birding binoculars such as the Monarch 7 or Viper HD. This quality midrange glass has gotten to the point of being very near to my Venturers. By my judgment, nearer than the 1 mile ARC’s. I don’t say any of this to denigrate the fusion 1 mile ARCs optics. As I have said, I think they are very good. Rather, I want to help the reader to get a good feel regarding what to expect. These laser rangefinding binoculars have a lot to do besides being a binocular and expecting them to keep pace with well chosen mid-priced birding glass is unrealistic.
What a person really wants to know about the optical quality of a laser rangefinding binocular is not whether or not it will replace a set of birdwatching binoculars, but rather whether it will replace his observation glass as well as his rangefinder. That is, can you sit on a hillside and glass the surrounding terrain for a good long time? Is the binocular sharp enough to pick out game and prevent eye strain? I found these to perform quite well in this role. I would extrapolate they are comparative enough to the popular Monarch 5s (formally simply Monarchs.) In short, they are good. They will replace your current observation glass and are far better than most other rangefinding binoculars that I have tried. However, don’t expect a miracle.
Background: How Laser Rangefinders Work:
As with most tools in life, a better understanding of the principles behind, and idiosyncrasies of, the tool’s function often results in more skillful use and better outcomes. The purpose of this section is to help familiarize the reader with just what a laser rangefinder actually sees and how it analyzes and conveys this information to the user.
Though a variety of methods can be used to assess distances using lasers, the majority of laser rangefinders, including this one, employ a time based calculation for distance. What this means is that the pulse is sent out, bounces back, and the time between these two events is used to calculate the distance. This is easy enough in principle. In practice, however, a variety of factors complicate this; and the resulting data then requires some interpretation. The most important of these factors are beam dispersion, refraction, and background radiation.
Beam dispersion refers to the fact that the shape of a beam being emitted from the range finder is a cone, with the wide base oriented to the target, and not a rod. In actuality, this is something of a simplification as many rangefinders, this one included, emit a beam that is not round in cross section. Many beams are rectangular and therefore are more like a pyramid with the wide base at the target and the point at the range finder and not a cone. The point is that, at the target, the beam will cover a substantial area not a point. At this time, a particularly tight beam dispersion is something like 2 mils. This is 7.2″ at 100 yards or 72″ at 1000 yards. Even with this tight pattern, if you are trying to range your quarry at 1000 yards, unless it is an elephant, much of that beam will be reflecting back from what is around and behind the quarry and not the animal itself. Similarly, if you are ranging a steel target at that range, you might actually be ranging more backstop than target. Most rangefinders exhibit a much larger dispersion than this 2 mils. Most of the time, these may receive a signal comprised mostly of light not reflected off of the target. Data analysis will therefore be necessary to pick the target out from what is not target. Similar in effect to this, many targets are not perfectly flat and perpendicular to the rangefinder. Because the beam is broad at the target end, this means that what is reflected back will not be a single sharp signal but something of a pattern. If you aim at a hillside, for instance, some will be reflected off the closer bottom of the hillside, some off of the top, and some off everything in-between. A tree will also give a broad reading as it is a three-dimensional object with reflective parts and pieces throughout. What the rangefinder actually sees, therefore, is not to be represented as a single blip at a single distance, but rather a plot of signal strength vs. distance with a variety of peaks and valleys corresponding to distances at which a little (valleys) or a lot (peaks) of the beam was reflected back. The range finder may carry out all the interpretation of this plot itself or allow the user some degree of control. In theory, it could also present the entire plot to the user for interpretation, though I am not aware of any models that do this.
Refraction refers to the bending of light through mediums of differing density such as air or water. The pulse sent out by a range finder must travel though a great deal of medium before returning. This air will have a variety of different temperatures and moisture contents. It may also contain microscopic or macroscopic water droplets. All of this, as well as dust in the air, will serve to scatter or absorb the laser such that much of the beam will either not hit the target or not return. The effect of this will become more pronounced with distance at the same time that beam dispersion dictates that the beam is more spread out with distance. This works together to dictate that the further an object is, the less signal could possibly be reflected off of it. At some range, therefore, the signal will not be strong enough to be distinguished from the last of your important factors.
Background radiation is omnipresent but varies greatly with atmospheric conditions. At night, if you could see the target to range it, you would not have much of a problem. On a hot day, however, the sun is introducing a tremendous amount of electromagnetic radiation that is reflecting, refracting, transferring energy to objects, and being radiated once again at different wavelengths. Some of this cacophony of radiation will be close enough to the wavelength used by the rangefinder to be picked up. This radiation will form a floor to the possible signal strength returned from the object ranged that could be read.
I have made the following crude diagram of what the user, and the rangefinder, might see in a particular contrived scenario in order to help the reader to understand the type of data a rangefinder might be interpreting. This may help the user to judge how reliable a particular reading might be in a given situation. This may also help the user, where possible, to present the rangefinder with scenarios where it might have an easier call to make.
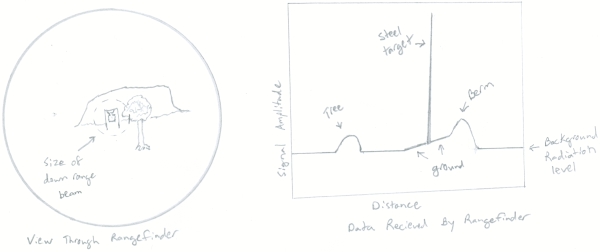
As you study the above diagram and plot, keep in mind the following possible ways in which the data might be interpreted by the rangefinder and how those interpretations would effect the user not only in this example situation, where the steel target is the desired object to be ranged, but in other scenarios as well: perhaps when ranging softer targets against hard or absent backgrounds.
1) A rangefinder might be programmed to display the closest peak in amplitude to the user. This would be the tree.
2) A rangefinder might be programmed to display the furthest peak in amplitude. This would be the berm.
3) A rangefinder might be programmed to pick the peak with the greatest area underneath. This normally corresponds to the object filling the greatest area of the diverged laser beam down range. In this example, this would be the berm.
4) A rangefinder might be programmed to pick the peak with greatest maximum amplitude. This usually corresponds to any object that is sufficiently large, reflective, and mostly perpendicular to the shooter. In this case, that is the steel target.
5) A rangefinder might be programmed to choose the peak that is the sharpest. This would select for objects with surfaces most flat and perpendicular to the shooter regardless of size. In this case, the peak corresponding to the target would be selected.
Rangefinding Testing:
For the rangefinding testing I chose a nice, sunny, bright day to go up to the dam. I wanted a challenge and sunny days with their incumbent background radiation offer that for a laser rangefinder. I also wanted a variety of ranging targets, conditions, and distances. The dam is the perfect place to achieve this, as a vantage point atop offers no end of variety. After a few hours,I had become reasonably adept at predicting what would and would not range, and how to best choose the settings for tricky situations. This Bushnell device is unusual in offering the user some meaningful settings relating to how the device processes the signal that will be discussed later on.
The first rangefinding situation I will speak about is ranging a soft target. This is what the inexperienced user imagines a laser rangefinder being used to do. You put the rangefinding crosshair on your quarry, hit the button, and the range pops up. To a degree this can be done, but, given the generally small sizes of animals compared to, say, trees or hillsides, and given beam divergence, this can only be done so far. In the case of the Bushnell Fusion 1 Mile ARC, I found this maximum distance to be 600 yards on a soft, some quite soft indeed, man-sized target under difficult atmospheric conditions. You would get about a 1 in 8 return of result in this scenario. That is to say, if you hit the button 8 times, the unit would find a range for you one of those 8 times. At 550 yards you would get a result about half the time, so you can see how quickly the signal drops out near the max range for a specific target. This scenario also assumes that you choose the rangefinder mode correctly. Bushnell, recognizing that the rangefinder often reads several distinct ranges, allows you to specially menu-select modes of closest preference or furthest preference. This is useful in excluding the background (bullseye) or foreground (brush) if you expect either to be delivering a stronger signal than the target. Before we leave the topic of small soft targets, I should also mention that, being small and far away, support is necessary for the user when taking the range or you won’t keep the crosshairs on what you intend to range. Even if the beam divergence was nil, this would be a distance-limiting factor for rangefinding binoculars. It’s kind of like pointing an unsupported handgun at a target 600 yards off and expecting to hit it. That is, if the trigger of your handgun was on the top, perpendicular to the barrel, instead of parallel. To put it simply, if you had a rangefinder capable of ranging a man-sized target at 1000 yards, you would also need a firm tripod if you intended to do that.
The next aspect to address is that of maximum range. In the difficult conditions I subjected the rangefinder to, both atmospheric and target, I was able to range a point of trees across the water at 1430 yards once. I was also able to range a tree line reliably, with, say, 1 out of 4 attempts returning results at 1200 yards. These are not easy targets, as trees are porous, only partially reflective, and quite three-dimensional. I am confident therefore in saying that when ranging large features of the landscape, you will not have problems out to beyond 1,200 yards. Given good conditions, such as hillside to hillside use in the west with good weather conditions, it is possible you might get the 1760 yards maximum range rating or even beyond. It is far more difficult to range an outcropping of trees at 1430 yards across a lake, in the bright sun, than to range a rocky hillside in less bright conditions.

Ranging angled surfaces is an important challenge for rangefinding, as probably the most common technique used to find the distance to game is to range the hill an animal is on or, if you are the one on a hill, the ground beneath the animal. It is easy to see that the longer the range and the slighter the angle of the surface relative to the user, the harder this is to do. I tested the confluence of these factors by sitting halfway down the back of the dam at a bend. As the distance increases, the angle decreases. In the over by under photos you can see the confluence of these factors at 436 yards. At this point, well within the rangefinders’ easy 100% return range, the hill’s angle becomes too shallow to be recognized by the unit as a target. It is hard to say exactly what this angle is, but I believe the photo is instructional. Also relevant to this image is the tree line directly above the central white clad individual. This is the 1,200 yard tree line mentioned above.
The last thing to mention regarding testing is accuracy. I tested the accuracy of this Bushnell at 120 yards against a different laser rangefinder and found them in complete agreement. I also tested it at 320 yards using a scaled riflescope and found a difference of 4 yards in measurements between the rangefinder and scope. I therefore conclude that the +- 1 yard claim for the Fusion 1 Mile ARCs accuracy is quite plausible. I am amazed at the precision of the information on range that can be achieved from this laser range finder relative to that typically gained through miling a target of somewhat uncertain size.
Ballistic Computer and Readout:
We have thus far spoken of the possibility for the rangefinding binoculars to replace, not surprisingly, the rangefinder and binoculars in a hunter’s gear. However, in my article following my experiences this year at SHOT, I also mentioned replacement of the ballistic computer, angle cosine gauge, thermometer, and barometer. Okay, while a competitive shooter might have all these things, most hunters probably eschew a few. The reason all these can be replaced is that the rangefinder is already a computing and measuring device. It is not difficult to add a few more gauges and a program for making ballistic calculations. Bushnell has not added all these gauges, but it did add and inclinometer and a basic ballistic computer. I say basic because, in rifle mode, it has seven preset ballistic profiles and you pick the closest. You do not get to enter your own data. The owner’s manual includes a table with drop ranges and what preset should be used, but the actual values of each preset at each range are not disclosed. While “bow mode” outputs range, angle (degrees), and “true horizontal distance”, the output from “rifle mode” is range (yds, meters), angle (degrees), and drop (MOA, Mil, or inches). This drop is calculated based on the selected ballistic profile and measurements. In either mode the new “Matrix” display is plenty bright and legible even in the brightest light.

Summary and Conclusion:
I was very excited to have the opportunity to take a look at these Fusion 1 Mile ARC rangefinding binoculars and I was not disappointed. The optics proved to be much better than I expected and will easily replace the observation binoculars that many hunters carry. While the ergonomics felt a bit bulky and I could not manipulate the focus knob without changing grip, the package nevertheless felt comfortable in hand and was lighter than the comparable products that I was able to find.
In rangefinding use, I found the Fusion 1 Mile ARCs to range soft, man-sized targets to 600 yards, and tree lines out to 1,200: both under difficult conditions. The ranges measured proved to be accurate enough for any purposes. Additionally, Bushnell’s “bullseye mode” and “brush mode” proved effective in mitigating problems caused by the unit’s significant beam dispersion such that I did not encounter a situation where I was unable to range the object I desired by utilization of one mode or another. The Fusion 1 Mile ARCs’ internal ballistic computer and accompanying profiles should prove accurate enough for most hunters and will significantly simplify drop compensation, extending the hunters effective range. Unfortunately, this system does not offer enough information, measurements, or precision to act as the sole ballistic computer and measurement device for a competitive shooter. The shooter will have to be able to add custom profiles and the device will have to add temperature and pressure sensors for this to be achieved.
I believe that the fusion of laser rangefinder, binoculars, atmospheric sensors, and ballistic computer is a natural and desirable eventuality. This marriage of devices will unburden the user of a significant amount of gear, as well as speeding up and simplifying long-range shooting. Few products exist to accomplish this and this is the only one I am aware of under $2K. At $1K it is a bargain and stands completely alone. It will meet the needs of most of the market as it stands, though I believe custom ballistic data and a few atmospheric sensors would need to be added to accommodate the most rigorous shooters.